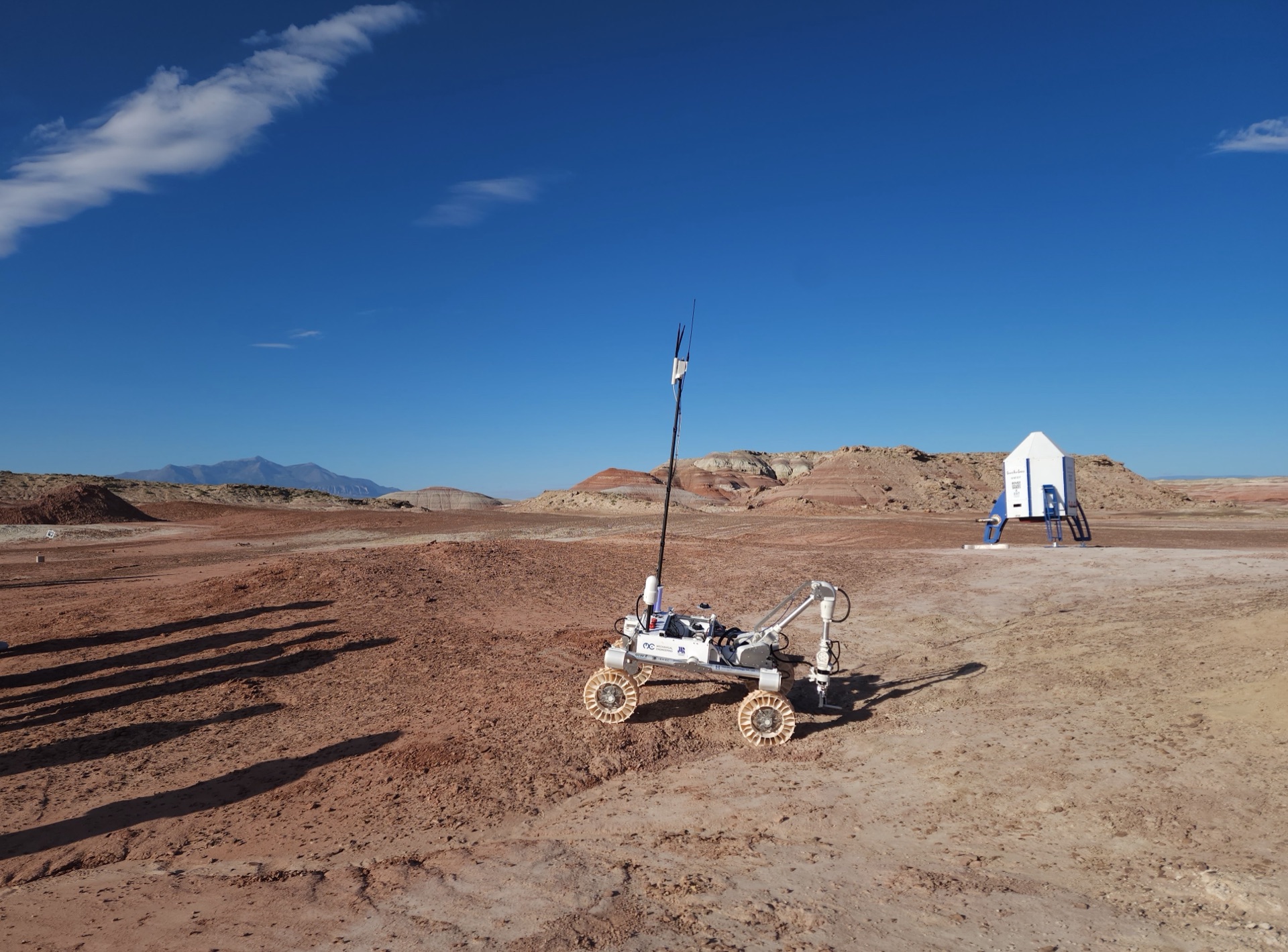
Building the Next Generation of Mars Rovers

Autonomous Robotics, Engineered at KAIST

Advanced AI and sensor fusion enable fully autonomous rover operations.
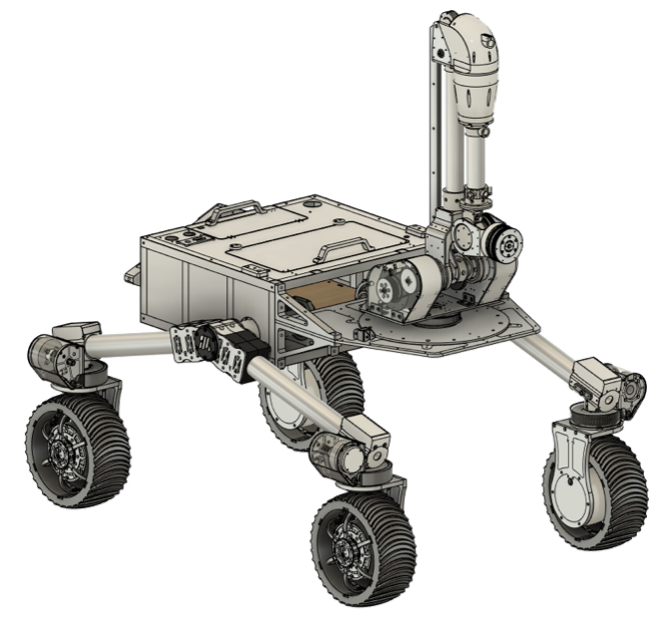
Robust design with custom suspension, arm, and drivetrain for extreme terrain.
Explore our GitHub repositories and contribute to cutting-edge rover development.








Thanks to
A feature story on the student-led build process behind MR2 and the team's first trip to the URC finals.
Photo coverage of MR2's rover assembly, testing, and mission preparation work at KAIST.
The official announcement of KAIST's first URC finals berth, including the team's score and GAP-1000 overview.
A space-focused column that frames MR2's rover challenge in the broader context of Mars exploration.
Science coverage highlighting the rover's manipulator, autonomous navigation, and onboard science systems.
A national wire summary of MR2's top-38 finish among 116 teams from 18 countries.

MR2 KAIST has completed its first University Rover Challenge finals. The URC 2026 finals were held from ...

We are proud to share that MR2 KAIST has been selected as a finalist for the University Rover Challeng...
...